

このページ内の目次

産業用ロボットは、これまでは人の安全を確保するために安全柵などで囲い、人とロボットの作業範囲を分ける必要がありました。
しかし、ロボットの小型化、ISO/TS15066による協働ロボットに関する技術仕様の公開、安全機能の搭載やリスクアセスメントの実施などにより、人とロボットが共通の作業空間で協調して作業することが可能になってきました。
さらに、日本における標準化活動の基盤となっている工業標準化法を改正し、2019年7月1日から「工業標準化法」は「産業標準化法」に変わり、「日本工業規格(JIS)」は「日本産業規格(JIS)」となります。
そこで、産業用ロボット全般に加え、人と協調して活動する「協調ロボット」に関係する主な安全規格の動向について整理します。
ロボットシステムに関係する安全規格
ロボットへの安全要求事項に関しては、2006年に国際規格として「ISO 10218-1:2006(JIS B8433-1:2007)」が発行されています。
そして、ロボットシステムとしての安全要求事項を、2011年に「ISO 10218-2:2011(JIS B 8433-2:2015)」として発行されたとともに、「ISO 10218-1」も再改定されました。
さらに、詳細な安全要求事項は、Technical Specification(技術仕様書)として審議が継続され、その技術仕様書は2016年2月に「ISO/TS 15066:2016」として発行されました。
労働安全衛生規則
産業用ロボット及びそのシステムは、各機械に対する共通事項とともに、以下の条項で規制されている。
- ・第36条第32号 危険業務として産業用ロボットの操作業務を規定
- ・第150条の3 教示等における安全要件
- ・第150条の4 運転中の危険の防止要件
- ・第150条の5 検査時の安全要件
- ・第151条 点検の実施
国際的な動向
ISO 10218-1:2011(JIS B 8433-1:2015)
産業用ロボットの本質的安全設計、保護方策及び使用上の情報についての要求事項及び指針について規定
ISO 10218-2:2011(JIS B 8433-2:2015)
産業用ロボット及び産業用ロボットシステムのインテグレーション並びに産業用ロボットセルに対する安全要求事項について規定
ISO/TS 15066:2016
この技術仕様書は、産業用協働ロボットシステムとその作業環境の安全要求事項について述べ、「ISO 10218-1(JIS B 8433-1)」に記載の産業用協働ロボットの運転に関する要求事項及びガイダンスを補完し、そして「ISO 10218-1(JIS B 8433-1)」及び「ISO 10218-2(JIS B 8433-2)」に記載される産業用ロボットシステムに適用
協働ロボットに関係する主な要求事項
ISO 10218-1:2011(JIS B 8433-1:2015)の要求事項
協働ロボットとして使用できる産業用ロボットは、ISO 10218-1:2011(JIS B8433-1:2015)の要求事項に適合していなければならない。
ISO 10218-2:2011(JIS B 8433-2:2015)の要求事項
本規格は安全性要求事項に適合させるための前提として危険源の同定及びリスクアセスメントの実施を要求している。
ISO/TS 15066:2016の要求事項
協働ロボットシステムとして基本的に備えなければならない共通安全方策と、システムを以下の4つに分類し、それらに必要な安全方策を規定している。
なお、これら4つのロボットシステムは、それぞれ単独とは限らず、複数をあわせ持つ場合がある。
- ・安全適合監視停止(Safety-rated monitor stop)
- ・ハンドガイド(Hand guide)
- ・速度と分離の監視(Speed and separation monitoring)
- ・動力と力の制限(Power and force limiting)
「ISO 10218-1:2011(JIS B 8433-1:2015)」及び「ISO 10218-2 (JIS B 8433-2)」では、直接、間接的に「ISO 13849-1:2006(JIS B 9705-1:2011)」の参照・適合を要求しています。
ISO 13849-1:2006(JIS B 9705-1:2011)の要求事項
適用範囲
ソフトウェアの設計を含み、制御システムの安全関連部(SRP/CS)の設計及び統合のための原則に関する安全要求事項及び指針、及び安全機能を実行するために要求されるパフォーマンスレベルを含む特性を規定している。
IEC 62061:2005(JIS B 9961:2008)の要求事項
IEC 61508(JIS C 0508)シリーズをもとに、機械の安全関連システム( SRECS : safety-related electrical control system)の設計、統合及び妥当性確認のための要求事項及び推奨事項を規定している。
協働ロボットに関する主な規制緩和
労働安全衛生規則:2013年12月
- ■改正前:80W以上のロボットは柵で囲い、人間の作業スペースから隔離すること。
- ■改正後
・ユーザーが、リスクアセスメントに基づく措置を実施し、産業用ロボットに接触することにより労働者に危険の生ずる恐れが無くなったと評価できるときは、柵で囲うことなく人間と協調作業をして良い。
・ISOの規格により設計、製造及び設置された産業用ロボットであり、メーカー・ユーザーが其々「技術ファイル及び適合宣言書」を作成している場合、柵で囲うことなく人間との協調作業をして良い。
日本工業規格(JIS):2015年3月、ISO 10218-1:2011(JIS B 8433-1:2015)
- ■改正前
ロボットの可動範囲に人が立ち入った場合、ロボットの電源を落として動作停止することが必要である。
- ■改正後
・適切な制御システムの導入や制御システム故障時の取扱を定めることで、電源を落とさずにロボットを停止することを認める。
・但し、製造者及び設置者が技術ファイル及び適合宣言書を作成したものであることを条件とする。
ロボットに関係する主な用語及び定義
国内の法令においては産業用ロボットシステムに対する定義はありませんが、一般的には、「安全柵を含めて、それに囲われた産業用ロボットとその周囲の機器類」としています。
しかし「ISO 10218」では、「ロボットがタスクを行うために必要なあらゆる機械類、設備、装置、外部の付加軸又はセンサ」を産業用ロボットシステムに含めていますので、安全柵の内外に関係なく、ロボットのタスクに関わるものは産業用ロボットシステムに含まれることになります。
また「ISO/TS 15066:2016」では、以下の記述があります。
協働ロボットシステムでは、ロボットのアクチュエータへ動力供給中に、オペレータが、安全柵などで作業空間が分断されることなく、ロボットシステムの近接で作業することができる。
日本工業規格(JIS B 0134-1998)
産業用ロボット(No.1100、industrial robot)
自動制御によるマニピュレーション機能又は移動機能をもち、各種の作業をプログラムによって実行できる、産業に使用される機械
マニピュレータ(No.1110、manipulator)
互いに連結された分節で構成し、対象物(部品,工具など)をつか(掴)む、又は、動かすことを目的とした機械
備考:マニピュレータは、オペレータ、可変プログラマブル、コントローラ、カム機構やリレー制御回路などで構成される論理システムによって制御される。
アクチュエータ(No.3005、machine actuator)
ロボットの動力を発生させる動力機構
例:電気、油圧、空気圧エネルギーをロボットの運動に変換するモータ
「ISO 10218」及び「ISO/TS 15066」
産業用ロボット(industrial robot)
産業オートメーション用途に用いるため、位置が固定又は移動し、3軸以上がプログラム可能で、自動制御され、再プログラム可能な多用途マニプレータ
産業用ロボットシステム(industrial robot system)
産業用ロボット、エンドエフェクタ、ロボットがタスクを行うために必要なあらゆる機械類、設備、装置、外部の付加軸又はセンサを含む
協働ロボット(collaborative robot)
規定された協働作業空間で、人間と直接的な相互作用をするように設計されたロボット
協働運転(collaborative operation)
特別の目的で設計したロボットが、定義した作業空間内で人間と直接協働して動く状態
参考:JIS法(産業標準化法)改正関連

出典:産総研「ロボットサービスの安全マネジメントに関する規格JIS Y1001発行」
第四次産業革命の下、IoTやAIなどの情報技術の革新、モノだけではなくマネジメント分野やサービス分野等の規格が制定、業種を越えた国際標準化の進展などに伴い、標準化の対象やプロセスにも変化が現れている。
この様々な環境変化に対応するため、日本における標準化活動の基盤となっている工業標準化法を改正
- ・データ、サービス等への対象拡大
- ・JISの制定・改正の迅速化
- ・JISマークによる企業間取引の信頼性確保
- ・官民の国際標準化活動の促進
改正のポイント
- ・JISの対象拡大・名称変更
標準化の対象にデータ、サービス、経営管理等を追加し、「日本工業規格(JIS)」 を「日本産業規格(JIS)」に、法律名を「産業標準化法」に改正
- ・施行日:2019年7月1日
※対象分野の標準化手続きは2018年11月29日から可能
- ・経過措置:旧JIS法に基づくJISは、次の改正までの間新法に基づくものとみなす。
| 産業用ロボットおよびサービスロボットの安全に 関する規格や規則 |
||
|---|---|---|
| ロボット本体(機械)の安全 | ロボット運用時の安全 | |
| 産業用ロボット | ISO 10218/JIS B 8433 | ISO 45001/労働安全衛生法 |
| サービスロボット | ISO 13482/JIS B 8445 JIS B 8446-1~3 |
従来なし ↓ 新規格(JIS Y 1001) |
産総研「ロボットサービスの安全マネジメントに関する規格JIS Y1001発行」を参考にしてATY-Japanで作成
ロボットサービスの安全規格(JISY1001)制定
- ・様々なロボットを用いてサービスを提供するロボットサービスプロバイダに対して、安全な管理や運用に関する要求事項を体系化、標準化し、新JIS法におけるサービス分野規格第一号として「JISY1001サービスロボットを活用したロボットサービスの安全マネジメントシステムに関する要求事項」を制定
- ・これまで工場の中だけで用いられてきた産業用ロボットと異なり、公共の場所等で、一般の方を対象にサービスを提供する際の安全性を確保したり、周囲の第三者への影響を考慮したりする必要がある場合を想定し、ロボットサービスプロバイダが実施すべきリスクアセスメントや安全管理、教育、運用体制、マネジメントシステムなどについて規定
以上、産業用ロボット全般に加え、人と協調して活動する「協調ロボット」「協働ロボット」に関係する主な安全規格の動向について整理しました。
近年のIoTやAIなどの情報技術の革新に伴い、産業用ロボットも複雑な作業もこなすようになり、より人間の作業に近づいてくることが予想されます。
人と同じ空間で安全に作業を行える「協調ロボット」を有効活用することにより、製造現場を革新することができます。
しかし、産業用ロボットの安全規格や機能安全に関する規格は整備されつつありますが、システム統合における機能安全設計に関して明確にしていくことは今後の課題でもあります。
例えば、ロボット本体以外のエンドエフェクタ(ロボットハンド)の制御や周辺の連携する機械設備の制御などは、システム統合者の役割となります。
最近のロボットメーカーやロボットSIerは、ロボットを含めたシステム全体の提案・導入(構築)を支援するサービスを展開しています。
関係する法規制を遵守し、自社の環境に応じた効果的な導入が必要となります。
参考情報
ISO/IEC関係
- ・日本工業標準調査会(JISC:Japanese Industrial Standards Committee)
機能安全活用実践マニュアル(厚生労働省)
- ・機能安全活用実践マニュアル(PDF)、中央労働災害防止協会、2017年2月
一般社団法人 日本ロボット工業会
日本工業規格(JIS)を制定・改正(経済産業省)
- ・ロボットサービスの安全規格(JIS)を制定、経済産業省、2019年5月20日
- ・ロボットサービスの安全マネジメントに関する規格JIS Y1001発行、産総研、2019年5月20日
ロボット関係
この記事の筆者
関連記事
前へ
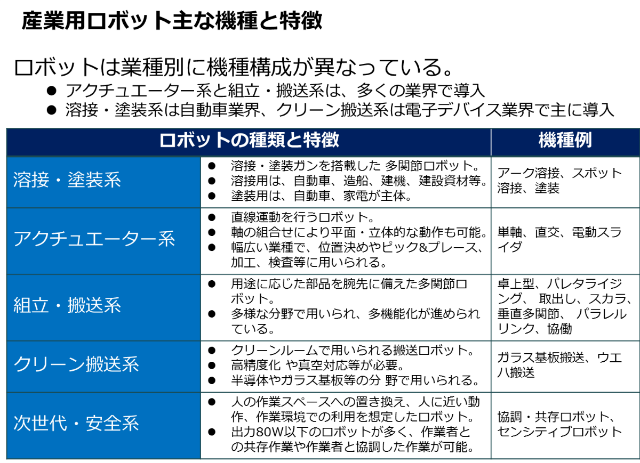
ロボットの市場動向-種類と特徴及び販売台数構成、ロボット産業の市場動向と今後の予測
次へ
書籍 アフターデジタル オフラインのない時代に生き残る/藤井 保文、尾原 和啓(著)